
手 机:188-4051-2327
联系邮箱:ddnyjd@163.com
邮政编码:118009
网 址:www.ddnyndt.com
公司地址:丹东市临港产业园区仪表园文庆路70-30号
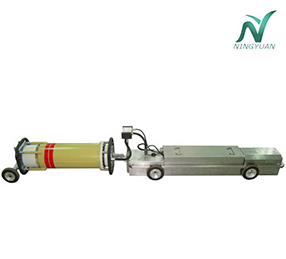
管道爬行器的结构及技术特点
管道爬行器的结构及技术特点JME10/60型爬行器采用组合式结构,带有u进的微处理器系统,所有功能可以预设,由一个低能信号发生同位素从管道外进行全遥控操作,是一种组装方便、操作简单的探伤设备。主要有小车(牵引装置)、可充电电池组、电子控制(逻辑装置)、遥控盖格探测装置和射线源以射线机头或y源等组成。
X射线管道爬行器是在管道敷设工程中对管道对接焊缝进行周向X光拍摄的检测设备。用一个牵引小车将周向X射线探伤机带入管道内部,当射线机的射线发射窗口对准焊口位置时,通过磁力接收传感器,使射线机按照设定的曝光电压和曝光时间对管道内焊口进行曝光。由于采用周向X射线探伤机在管道内部中心曝光,焦距短、单壁投影,一次曝光即可完成整道焊口的曝光,同定向射线机在外部双壁投影的方法相比,工作效率能够提高几十倍。爬行器在管道内部的运动,由管道外部的磁力发射器控制箱进行控制,以完成前进、后退、停止、曝光等动作。具有完善的自救功能。
当主驱动器出现故障时,PLC会自动切换到备用驱动器,自行完成倒车指令。具有遇水倒车功能:当管道内积水深度超过设备使用标准要求时该设备会自动退出;并具有遇阻倒车功能:当管道内不清洁有障碍物阻挡爬行器正常行驶时,设备也会自动退出。驱动轮与从动轮之间备有传动连杆(可自选是否装配),运行平稳有力、不跑偏。管头配有可旋转支架,180°两档位调整,克服了因管头长时间一个方向工作,X光管灯丝塌陷场强不均的现象。
驱动采用步进电机,可实现在坡路中高精度定位。具有完善的自救功能。当主驱动器出现故障时,PLC会自动切换到备用驱动器,自行完成倒车指令。具有遇水倒车功能:当管道内积水深度超过设备使用标准要求时该设备会自动退出;并具有遇阻倒车功能:当管道内不清洁有障碍物阻挡爬行器正常行驶时,设备也会自动退出。驱动轮与从动轮之间备有传动连杆(可自选是否装配),运行平稳有力、不跑偏。管头配有可旋转支架,180°两档位调整,克服了因管头长时间一个方向工作,X光管灯丝塌陷场强不均的现象。
声明:本文仅供交流学习,版权归属原作者,部分文章推送时未能及时与原作者取得联系,若来源标注错误或侵犯到您的权益,烦请告知,我们将立即删除,谢谢!!!
 |  |
| 官方微信 | 官方手机网 |



