
手 机:188-4051-2327
联系邮箱:ddnyjd@163.com
邮政编码:118009
网 址:www.ddnyndt.com
公司地址:丹东市临港产业园区仪表园文庆路70-30号
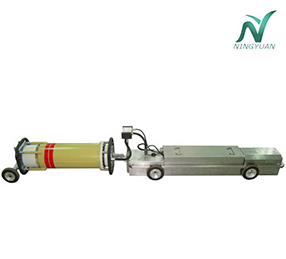
X射线管道爬行器基本原理
X射线管道爬行器基本原理主要由机械行走部分、射线发生部分、定位传感器、逻辑控制器、电源及管道外部的遥控定位用指令源等组成,它是一种自动化射线产生装置,由机械行走部分带动射线发生装置在管道内部行走,在管道外对接焊缝处贴X射线专用胶片和标记,通过管道外部遥控装置的配合,可以在管道内定位及曝光,从而对管道对接环焊缝进行X光透照,实现管道对接环焊缝的无损检测,另外,还可以通过遥控控制爬行器的前进、后退、休息等动作。
控制器(电路)部分:通过研制γ射线爬行器的经验,继续采用原可编程控制器(FX0系列20点继电器输出型),具有体积小、供电方便、可靠性高的特点。电路布线方面尽量简单化、以方便维护,就近安排强电部件,将强电与弱电分离,以免造成对控制系统的干扰[2]。电动车供电:考虑到控制器供电方便和电动机供电时间的要求,电动车电源采用24V直流电源。使用一套90%充足电的38安时电池,行走速度18米/分钟,平均工作电流4安培计算,可以连续爬行约7.6小时(80%放电容量),爬行距离8208米。爬行距离远是一项重要特色,这样可以适应一台爬行器工作在几个工作面轮流工作和“二接一” 间隔检测的施工技术要求。
声明:本文仅供交流学习,版权归属原作者,部分文章推送时未能及时与原作者取得联系,若来源标注错误或侵犯到您的权益,烦请告知,我们将立即删除,谢谢!!!
 |  |
| 官方微信 | 官方手机网 |



